






Experiment in Torque Model of Digging the Lunar Soil Simulant
-
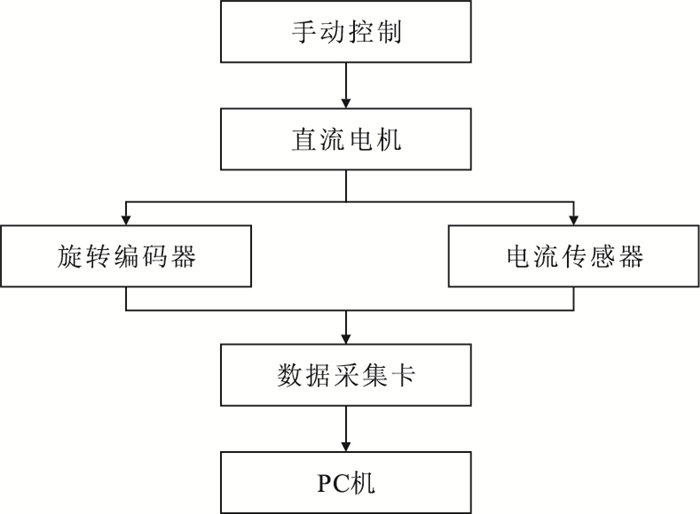
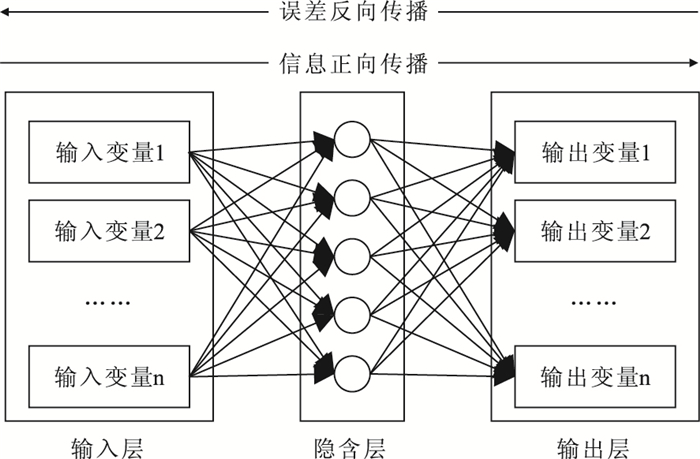
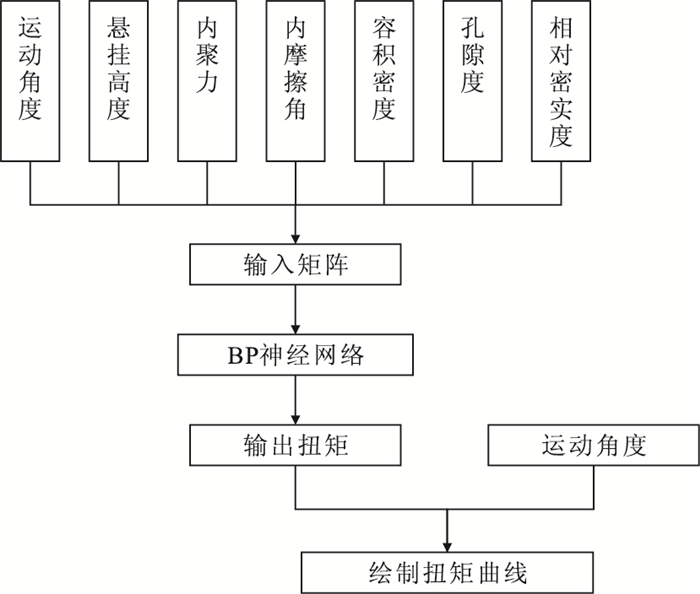
摘要: 开展月球探测对于提升我国综合实力具有重要意义.按照计划我国将在2017年左右完成月球采样并返回地球的目标.目前国内各科研院所对采样机具的研究多集中在钻取机具的设计及其仿真模拟上,对表层取样机具研究较少.基于表层取样研发了一套由直流电机驱动,并能通过检测其电流间接测算挖取运动扭矩的试验机构.利用该机构在6种不同的模拟月壤中进行不同试验参数的挖取试验后可知,在不同的试验条件下挖取机构承受的扭矩变化趋势大致相同,并能由4个特征点进行描述.4个特征点的取值随试验参数的不同而改变.完成试验后将试验数据进行归一化处理后导入BP神经网络进行学习和训练,建立了以运动参数(运动角度、机构悬挂高度)、模拟月壤类型(内聚力、内摩擦角)、模拟月壤密实程度(容积密度、孔隙度、相对密实度)为输入量,机具承受扭矩为输出量的神经网络模型.通过与实测数据对比可证明本文建立的BP神经网络挖取力学模型具有很高的拟合和预测精度.Abstract: It is very important to start the lunar exploration for the sake of the buildup of comprehensive strength of China. According to a national plan, the main task of Chang'E-3 probe is to sample on the moon and return to the earth. At present, the researches on sampling tools are focused on the designing and simulating the drilling tool and there is little research on the surface sampling tools. A simulated lunar surface sampling tool, which is driven by a DC motor and could measure the torque during the experiments by using the current sensor, is designed for the experiments. Based on six types of lunar soil simulant and parameters, the experimental data shows that the change tendency of the tool torque under different conditions is nearly the same, and the torque curve could be described by four-feature points, whose values change with the different experiments parameters. All normalized data is imported to the BP neural network for learning and training in order to establish the model. The input parameters are divided into three types, including motion parameters (angle and hanging height), type parameters (cohesion and internal friction angle), and dense parameters (density, porosity and relative denseness) and the output parameter is the torque. By comparing the measured data and the output data of the model, it shows that accuracy in both fitting and predicting of the BP neural network is extremely high.
-
Key words:
- surface sampling /
- lunar soil simulant /
- torque /
- neural networks /
- engineering geology
-
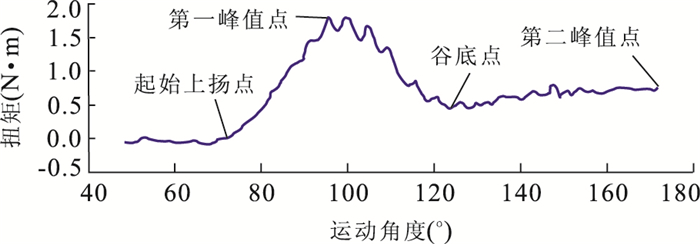
图 3 CUG_1.50松散型模拟月壤悬挂高度0.193 m的扭矩曲线及特征点划分
Fig. 3. Feature points and torque curve of loose CUG_1.50 simulated lunar soil at hanging height of 0.193 m
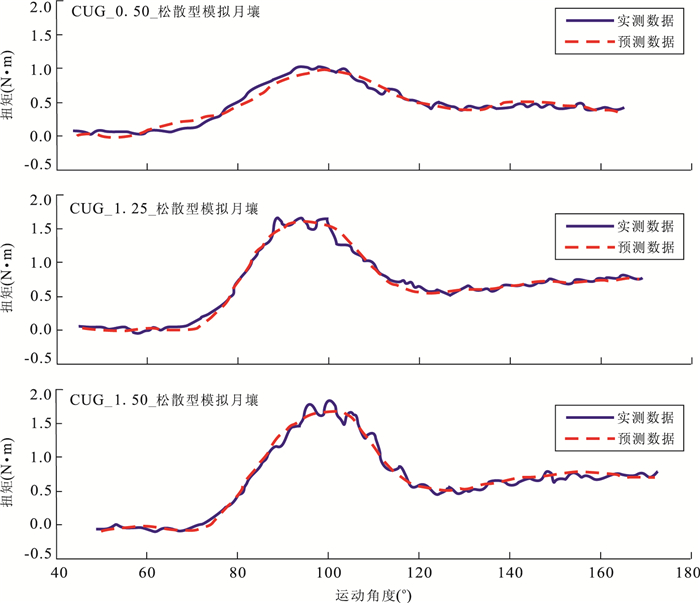
图 5 完成学习训练的BP神经网络3种不同的模拟月壤输出数据
Fig. 5. Validation between the real data and predict data from trained BP neural network among three different lunar soil simulant
表 1 试验所用模拟月壤力学参数
Table 1. Mechanical parameters of lunar soil stimulant prepared for the experiments
模拟月壤力学参数 CUG_0.50 CUG_1.25 CUG_1.50 松散状态 密实状态 松散状态 密实状态 松散状态 密实状态 容积密度(kg/m3) 364.000 473.000 1 129.000 1 286.000 1 799.000 1 894.000 孔隙度(%) 85.000 80.500 55.700 49.500 37.500 34.200 内聚力(kPa) 4.830 4.830 4.200 4.200 1.680 1.680 内摩擦角(°) 20.090 20.090 24.820 24.820 26.390 26.390 相对密实度 0.000 0.472 0.275 0.910 0.914 1.000  下载: 导出CSV
下载: 导出CSV
表 2 模拟试验特征点
Table 2. Total feature data at all experiments
模拟月壤 悬挂高度(m) 起始上扬点 第一峰值点 谷底点 第二峰值点 类型 状态 位置(°) 值(N·m) 位置(°) 值(N·m) 位置(°) 值(N·m) 值(N·m) CUG_0.50 松散型 0.203 59.2 0.012 102.3 0.740 131.7 0.041 0.293 CUG_0.50 松散型 0.193 63.1 0.064 98.1 1.048 121.8 0.444 0.512 CUG_0.50 松散型 0.180 62.4 0.079 97.1 1.867 125.7 0.567 0.630 CUG_0.50 密实型 0.203 62.6 0.003 98.4 1.610 116.0 0.241 0.450 CUG_0.50 密实型 0.193 58.3 0.027 91.8 2.784 120.1 0.465 0.616 CUG_0.50 密实型 0.180 57.0 0.089 91.5 4.061 124.6 0.542 0.670 CUG_1.25 松散型 0.203 65.8 -0.020 104.5 1.307 134.3 0.578 0.754 CUG_1.25 松散型 0.193 66.3 0.044 93.7 1.669 124.6 0.562 0.800 CUG_1.25 松散型 0.180 63.9 -0.038 99.2 1.809 133.7 0.678 0.863 CUG_1.25 密实型 0.203 61.1 0.020 110.0 4.037 172.3 0.851 0.851 CUG_1.25 密实型 0.193 59.2 0.008 94.5 4.257 120.8 0.695 1.074 CUG_1.25 密实型 0.180 63.1 0.013 105.4 5.475 132.1 1.008 1.085 CUG_1.50 松散型 0.203 65.3 -0.036 89.3 1.410 114.3 0.437 0.887 CUG_1.50 松散型 0.193 69.6 -0.040 95.7 1.815 122.4 0.497 0.810 CUG_1.50 松散型 0.180 63.9 -0.078 99.0 2.028 124.5 0.677 1.166 CUG_1.50 密实型 0.203 62.4 -0.090 97.5 3.367 118.8 0.468 0.999 CUG_1.50 密实型 0.193 60.0 0.021 97.4 4.159 113.1 0.664 1.064 CUG_1.50 密实型 0.180 58.3 -0.055 90.7 6.933 115.3 1.059 1.355
下载: 导出CSV
表 3 不同变量的归一化常数
Table 3. Normalization constants of different parameters
参数 归一化常数 参数 归一化常数 运动角度 180 内聚力 10 起始高度 1 内摩擦角 100 容积密度 2 000 相对密实度 1 孔隙度 100 扭矩 10
下载: 导出CSV
表 4 BP神经网络评价参数
Table 4. Evaluation parameters of BP neural network
建模阶段 均方差MSE 相关系数R 学习阶段 1.256×10-4 0.995 训练验证阶段 1.193×10-4 0.996
下载: 导出CSV
表 5 模型验证误差对比
Table 5. Comparison of model validation errors
模拟月壤 对比参数 预测 实测 误差(%) CUG_0.50 起始上扬点 位置(°) 51.6 63.1 18.2 CUG_0.50 起始上扬点 值(N·m) 0.056 0.064 12.5 CUG_0.50 第一峰值点 位置(°) 99.3 98.1 1.2 CUG_0.50 第一峰值点 值(N·m) 0.985 1.048 6 CUG_0.50 谷底点 位置(°) 125.1 121.8 2.7 CUG_0.50 谷底点 值(N·m) 0.413 0.444 7.0 CUG_0.50 第二峰值点 值(N·m) 0.500 0.512 2.3 CUG_1.25 起始上扬点 位置(°) 65.7 66.3 0.9 CUG_1.25 起始上扬点 值(N·m) 0.038 0.044 13.6 CUG_1.25 第一峰值点 位置(°) 94.6 93.7 1.0 CUG_1.25 第一峰值点 值(N·m) 1.614 1.669 3.3 CUG_1.25 谷底点 位置(°) 119.5 124.6 4.1 CUG_1.25 谷底点 值(N·m) 0.574 0.562 2.1 CUG_1.25 第二峰值点 值(N·m) 0.751 0.800 6.1 CUG_1.50 起始上扬点 位置(°) 67.9 69.6 2.4 CUG_1.50 起始上扬点 值(N·m) -0.046 -0.040 15 CUG_1.50 第一峰值点 位置(°) 99.3 95.7 3.8 CUG_1.50 第一峰值点 值(N·m) 1.681 1.815 7.4 CUG_1.50 谷底点 位置(°) 122.9 122.4 0.4 CUG_1.50 谷底点 值(N·m) 0.514 0.497 3.4 CUG_1.50 第二峰值点 值(N·m) 0.753 0.810 7.0
下载: 导出CSV
-
Anttila, M.E., 2005. Concept Evaluation of Mars Drilling and Sampling Instrument (Dissertation). Helsinki University of Technology, Holland. Bar-Cohen, Y., Bao, X., Chang, Z., et al., 2003. An Ultrasonic Sampler and Sensor Platform for In-Situ Astrobiological Exploration. SPIE Smart Structures and Materials Symposium, 5056: 457-465. doi: 10.1117/12.483391 Brian, C.G., Samih, B., James, F.R., et al., 2004. Geological Investigation of Lunar and Martian Subsurface Using Laser Drilling System. AIAA Space 2004 Conference and Exposition, 3: 28-30. doi: 10.2514/6.2004-6046 Ding, X.L., Li, K.J., Yin, Z.W., 2009. Multi-Rod Deep Drilling for Lunar Subsurface Sampling. Journal of Astronautics, 30(3): 1189-1194 (in Chinese with English abstract). Gao, Y., Alex, E., Mustafa, J., et al., 2006. Deployable Wood Wasp Drill for Planetary Subsurface Sampling. In: IEEE Aerospace Conference. Inst. of Elec. and Elec. Eng. Computer Society, Valencia. doi: 10.1109/AERO.2006.1655756 Gulkis, S., Alexander, C., 2008. Composition Measurements of a Comet from the Rosetta Orbiter Spacecraft. Space Science Reviews, 138(1-4): 259-274. doi: 10.1007/s11214-008-9335-2 He, X.X., Xiao, L., Huang, J., et al., 2011. Lunar Soil Simulant Development and Lunar Soil Simulant CUG-1A. Geological Science and Technology Information, 30(4): 137-142 (in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-DZKQ201104023.htm Liu, Z.Q., Pang, Y., Li, X.L., 2011. Characteristics and Applications of Automatic Sampling Mechanisms for Deep Exploration. Spacecraft Engineering, 20(3): 120-125 (in Chinese with English abstract). http://en.cnki.com.cn/Article_en/CJFDTOTAL-HTGC201103023.htm Lu, W., Song, A.G., Ling, Y., 2011. Research on the Sampler for Shallow Lunar Regolith. Journal of Astronautics, 32(9): 2065-2073 (in Chinese with English abstract). http://www.cqvip.com/main/zcps.aspx?c=1&id=39314523 Moore, H.J., 1978. Rock Pushing and Sampling under Rocks on Mars. U.S. Govt. Print. Off., Washington. http://adsabs.harvard.edu/abs/1978rpsu.book.....M Ou Yang, Z.Y., Zou, Y.L., Li, C.L., et al., 2002. The Moon—Outpost for Human Stepping into Space. Tsinghua University Press, Beijing (in Chinese). Pang, Y., Deng, X.J., Zheng, Y.H., 2011. The Design of Automatic Drilling Tool for Lunar Sampling. In: Chinese Society of Astronautics, ed., The Eighth Congress of Deep Space Exploration Subcommission under Chinese Society of Astronautics. Committee of Deep Space Exploration Technology, Shanghai (in Chinese). Shen, J.J., 2010. The Study of Multi-Pipe Lunar Soil Drilling-Sampling Technology (Dissertation). Harbin Institute of Technology, Harbin (in Chinese with English abstract). Thomas, M.M., Lee, C., Chau, C.J., et al., 2004. The RAT as a Mars Rock Physical Properties Tool. AIAA Space 2004 Conference and Exhibit, 3: 2141-2151. doi: 10.2514/6.2004-6096 Zhang, D.F., et al., 2012. Application of Artificial Neural Network Based on MATLAB. China Machine Press, Beijing (in Chinese). Zhang, Y., 2010. Research on the Key Technology of Drilling-Sampling System of Slide-Type for Lunar Soil (Dissertation). Harbin Institute of Technology, Harbin (in Chinese with English abstract). 丁希仑, 李可佳, 尹忠旺, 2009. 面向月壤采集的多杆深层采样器. 宇航学报, 30(3): 1189-1194. doi: 10.3873/j.issn.1000-1328.2009.03.058 贺新星, 肖龙, 黄俊, 等, 2011. 模拟月壤研究进展及CUG-1A模拟月壤. 地质科技情报, 30(4): 137-142. doi: 10.3969/j.issn.1000-7849.2011.04.022 刘志全, 庞彧, 李新立, 2011. 深孔探测自动采样机构的特点及应用. 航天器工程, 20(3): 120-125. https://www.cnki.com.cn/Article/CJFDTOTAL-HTGC201103023.htm 卢伟, 宋爱国, 凌云, 2011. 面向浅层月壤的小型取样器研究. 宇航学报, 32(9): 2065-2073. doi: 10.3873/j.issn.1000-1328.2011.09.028 欧阳自远, 邹永廖, 李春来, 等, 2002. 月球——人类走进深空的前哨站. 北京: 清华大学出版社. 庞彧, 邓湘金, 郑艳红, 2011. 面对月壤采集的自动钻取机构设计. 见: 中国宇航学会深空探测技术专业委员会编中国宇航学会深空探测技术专业委员会第八届学术年会论文集(下). 上海: 中国学术期刊. 沈进进, 2010. 多杆组接式月壤钻取采样技术研究(硕士学位论文). 哈尔滨: 哈尔滨工业大学. 张德丰等, 2012. MATLAB神经网络应用设计. 北京: 机械工业出版社. 张禹, 2010. 滑轨式月壤钻取采样装置关键技术研究(硕士学位论文). 哈尔滨: 哈尔滨工业大学. -

 点击查看大图
点击查看大图

计量
- 文章访问数: 3634
- HTML全文浏览量: 88
- PDF下载量: 609
- 被引次数: 0
